This project arose from the need to automate the manufacturing process, since it was manual and there were many costs associated with non-compliant parts, as well as to optimize cycle time.
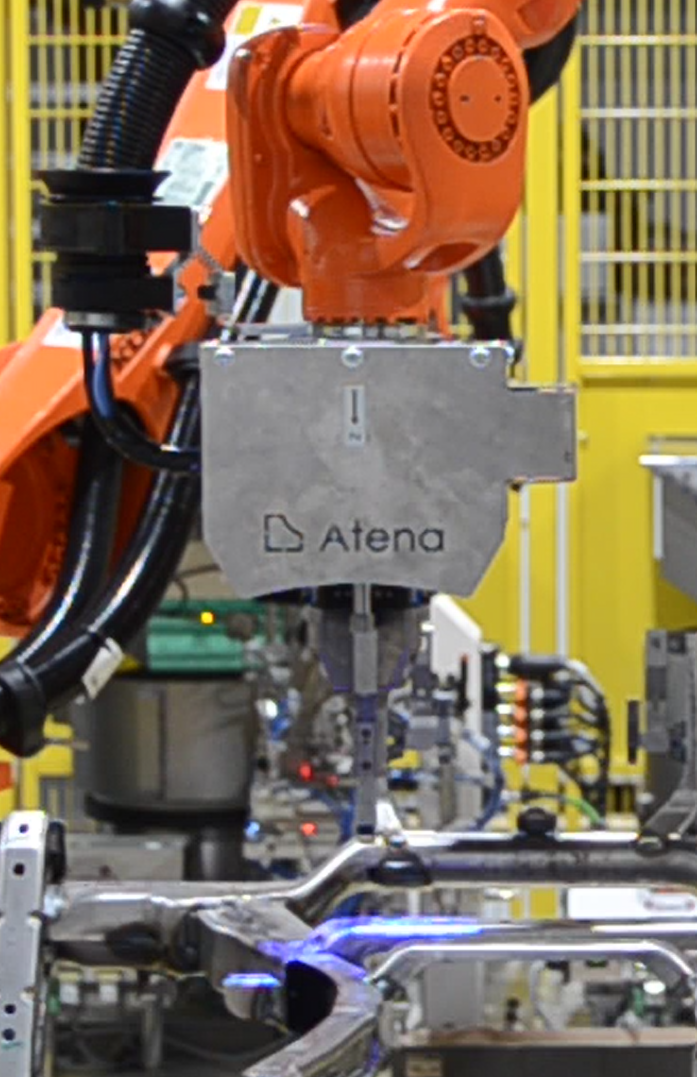
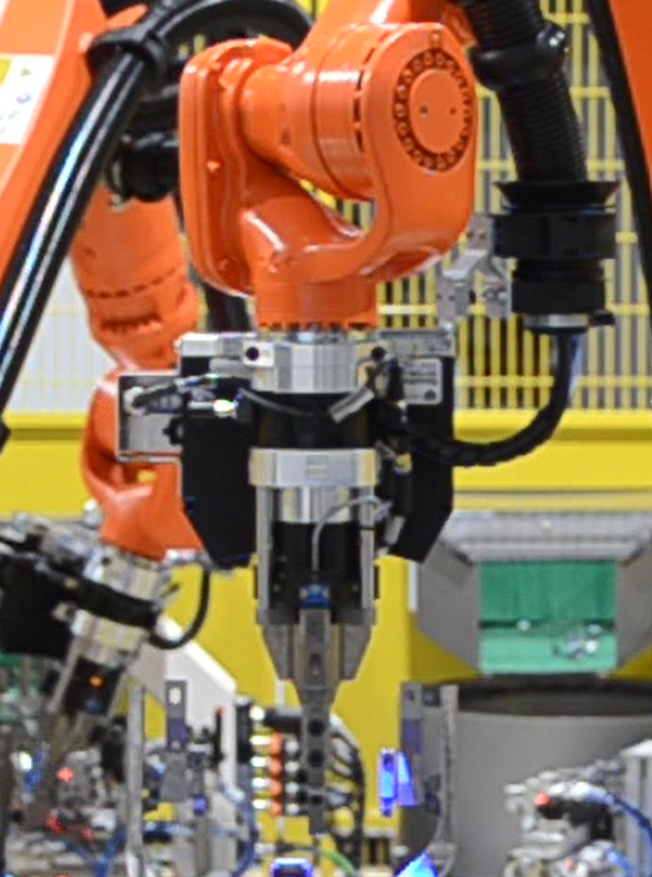
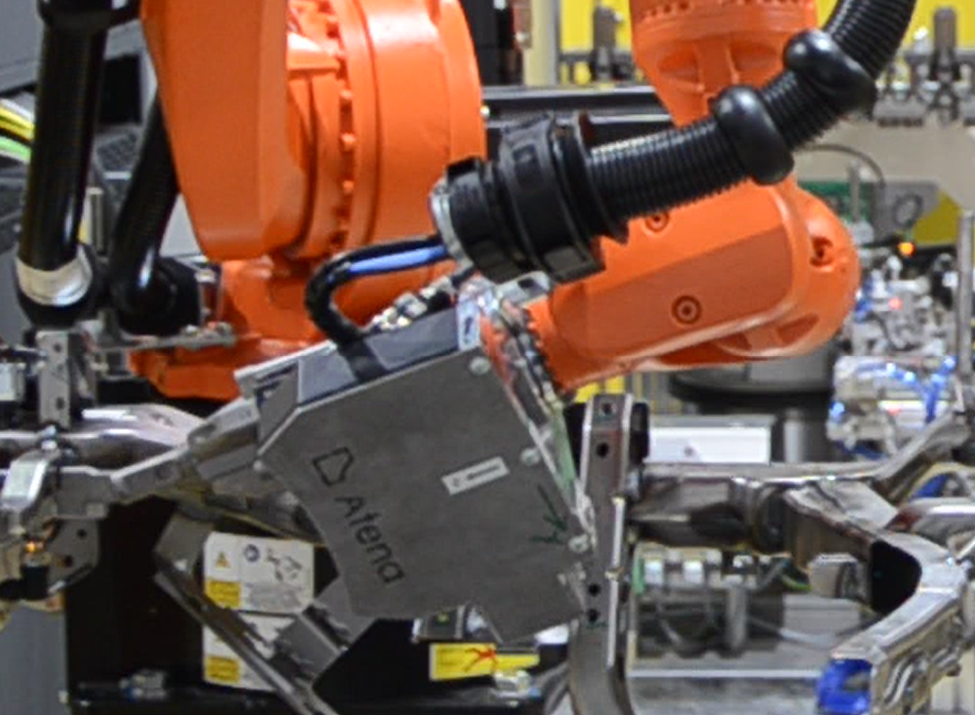
The purpose of this machine is to assemble metal clips onto a welded part. Since the part suffers warping and deviations in the clip insertion position after welding, it was necessary to install a 3D vision system to perform robot guidance.

{kind=link}

{kind=link}

{kind=link}